Proactive Firefighting UAV System
The Problem
Wildfires are often detected too late. Existing UAVs are reactive—deployed only after fires are raging. This delay costs lives and billions in damage. We needed a system that could predict and prevent fires before they spread.
The Solution
A Proactive Firefighting UAV that uses large-scale data processing (satellite feeds, sensor data, keyword scraping) to identify heat anomalies and deploy fire retardant autonomously before ground crews arrive.
System Operators & Interfaces
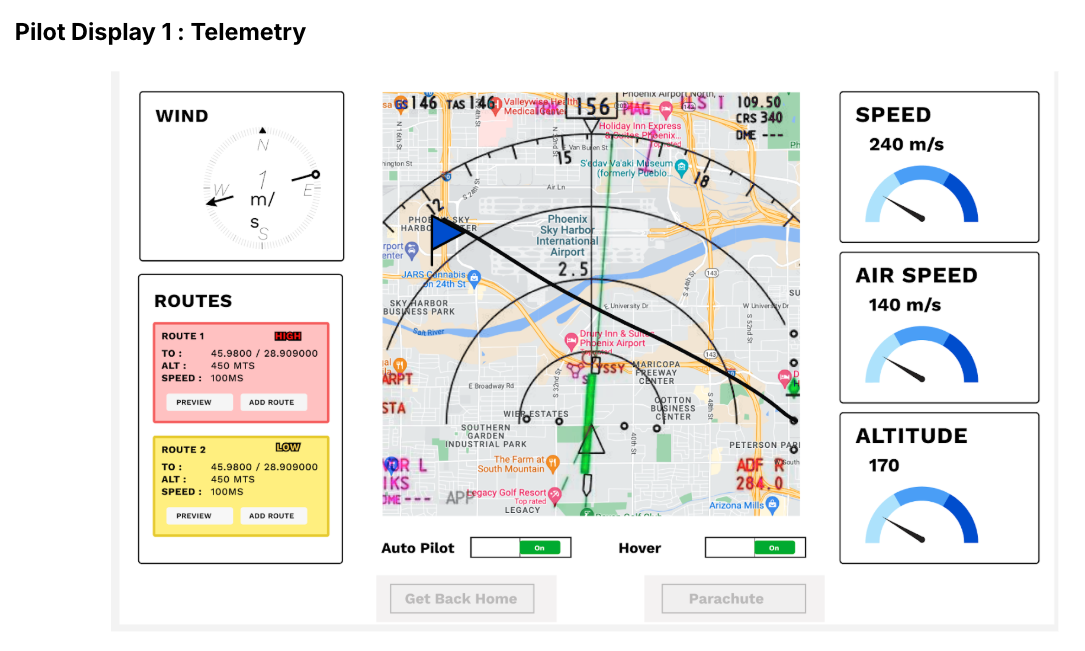
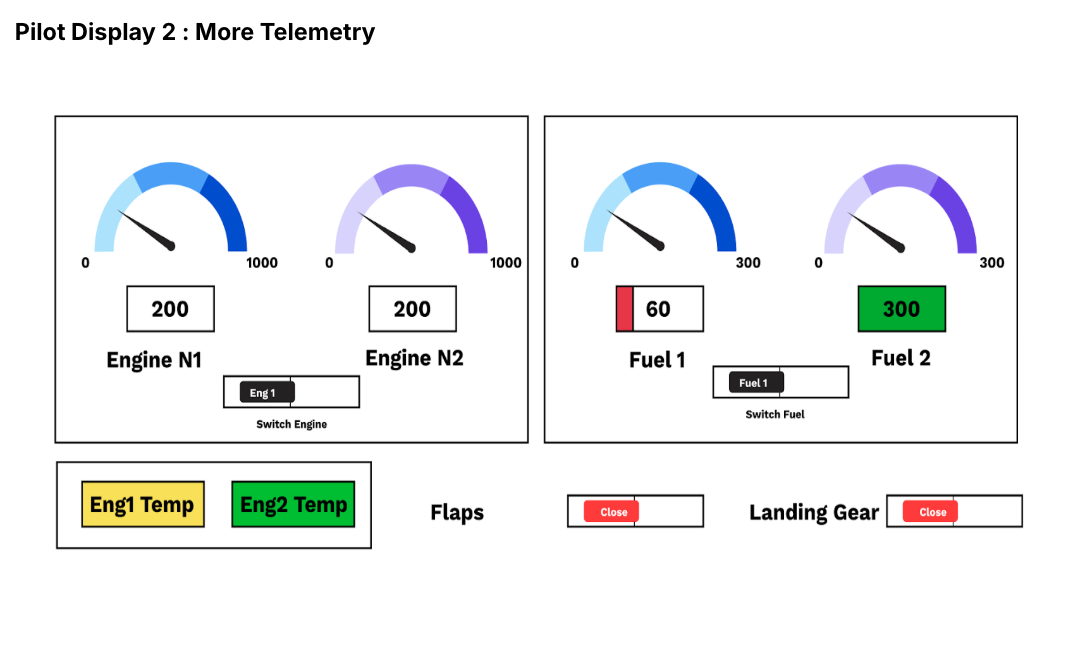
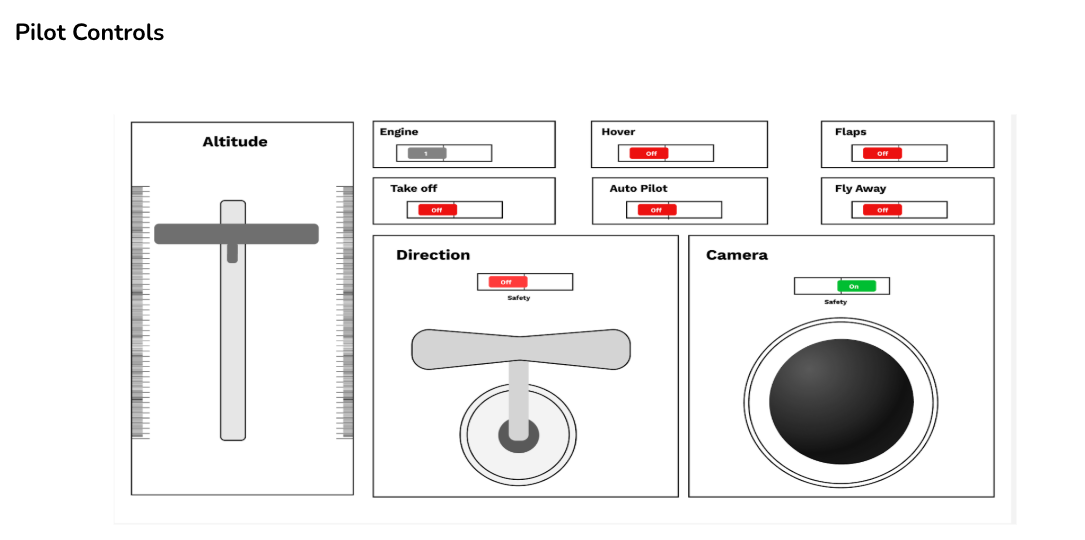
Pilot
Oversees the UAV's autonomous flight paths, monitors safety, and takes over whenever manual control is required. The pilot's interface includes telemetry data, navigation maps, and thermal camera feeds.
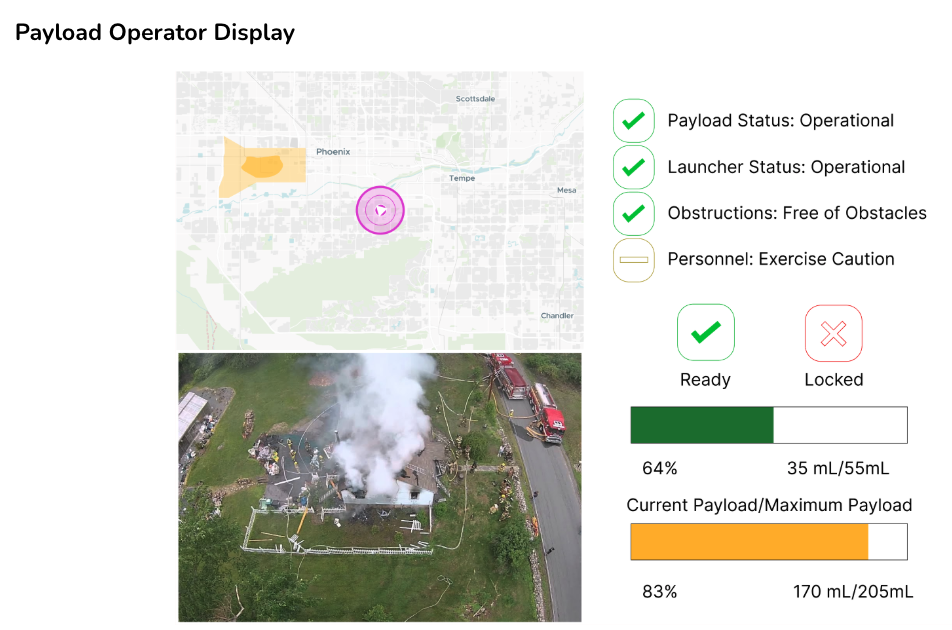
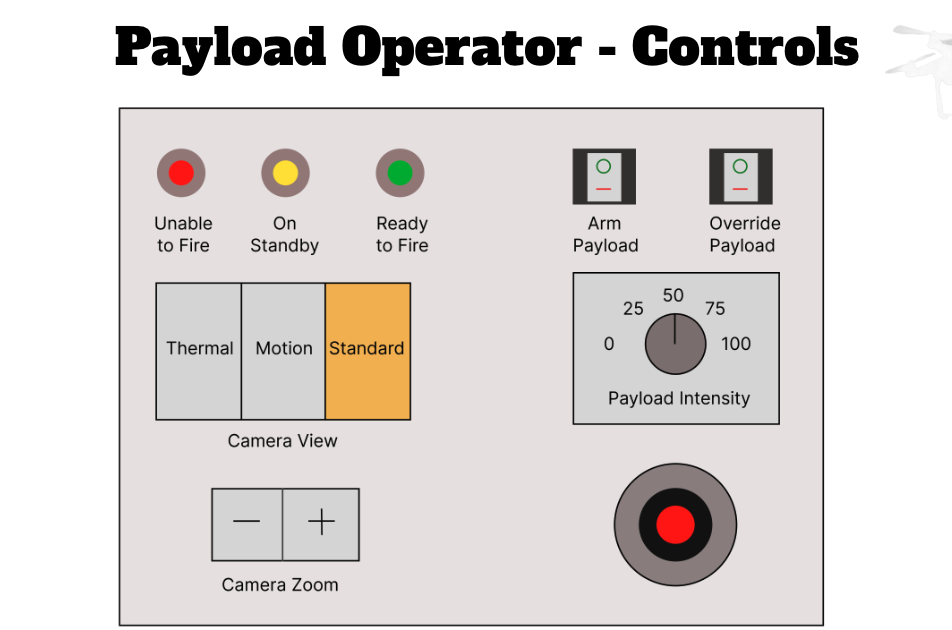
Payload Operator
Manages the fire suppression system. While the system can be automatically deployed, the payload operator steps in whenever manual intervention is required and oversees the release process.
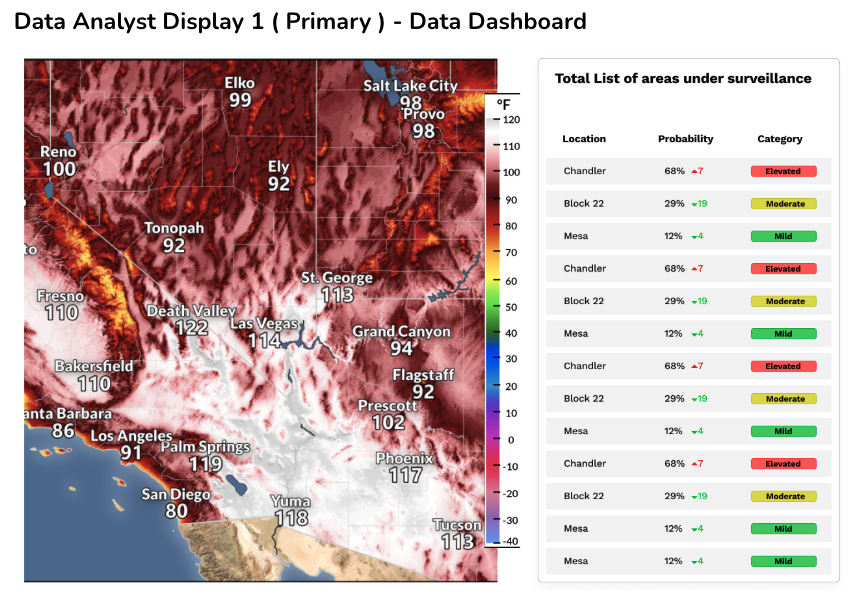
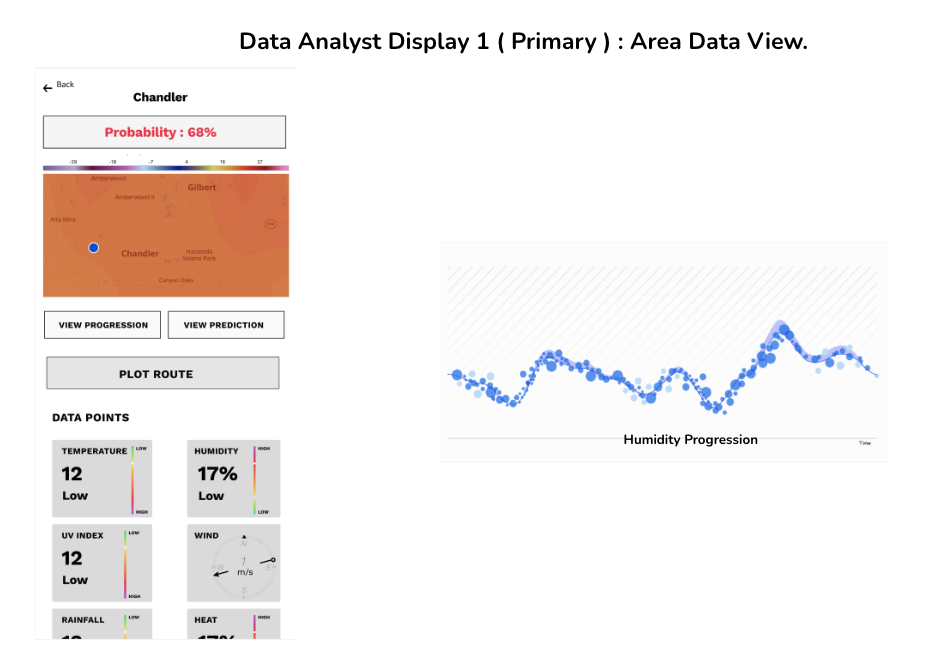
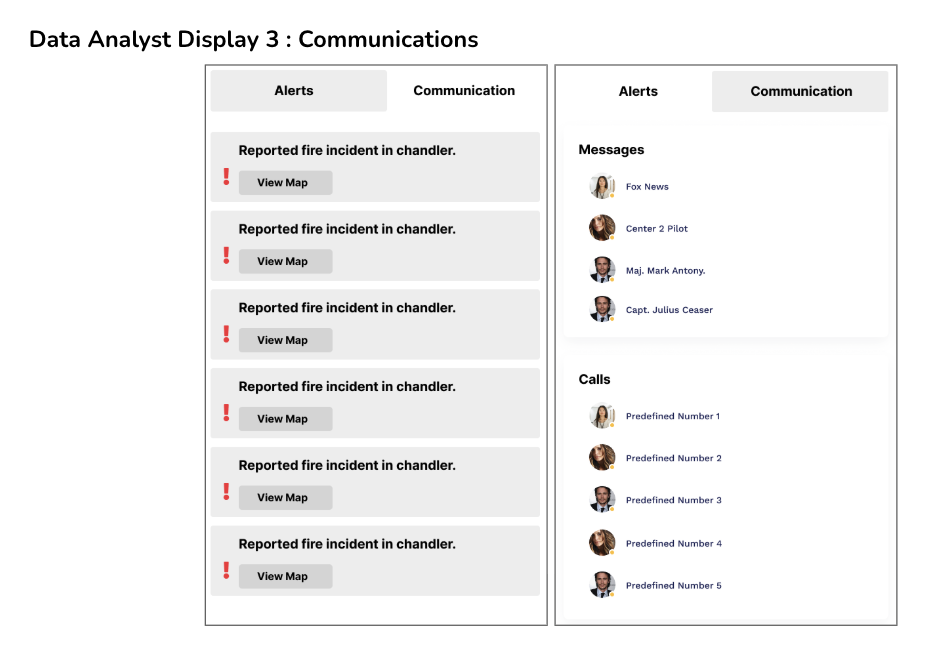
Data Analyst
Works on a multiple-screen setup, manages incoming sensor and environmental data, fine-tunes the keywords the system looks for, and monitors heat anomalies in real time.
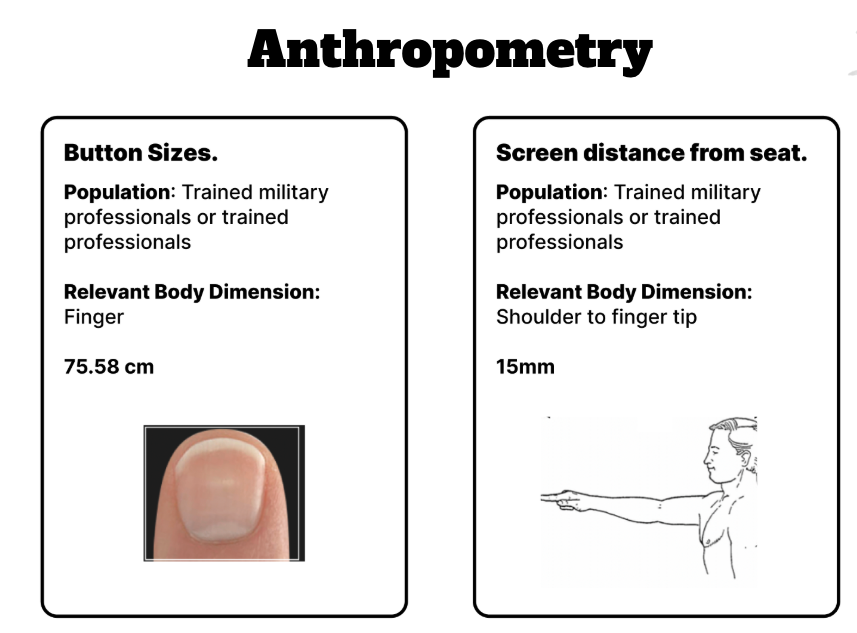
Ergonomics & Anthropometry
We ensured the system fit a wide range of users (5th to 95th percentile) using USMIL standards, calculating precise dimensions for controls, seating, and reach envelopes.
Development Phases
Concept Definition
This phase involved identifying our desire to work on a wildfire prevention UAV. Here, we defined the system's purpose, the operator structure, and solidified the overall concept.
Task and System Analysis
This phase involved conducting a hierarchical task analysis to define all operator roles, the types of information required, and the flow of information between operators. We cross-mapped these elements into various displays and control types. This phase helped us define each operator's responsibilities, inputs, and controls — where they come from, how they interact, and how information moves across the system.
Interface and Control Design
Now that we had our information architecture, we converted it into interfaces and control designs. We created mockups for each operator station, designed different data feeds, conceptualized the information flow pipelines, and determined the layout for dashboards, displays, and route planning tools for the data analyst. This phase resulted in an integrated control-display setup for all operator stations.
Ergonomics and Anthropometric Validation
Once the displays and controls were designed, we ensured they fit a wide range of users. We used USMIL standards to create affordacnes for the 5th to 95th percentile. We calculated thumb sizes for button dimensions, handhold sizes, seat height adjustments, seat inclination adjustments, and backrest adjustments. This helped ensure comfort and accessibility for most operators.
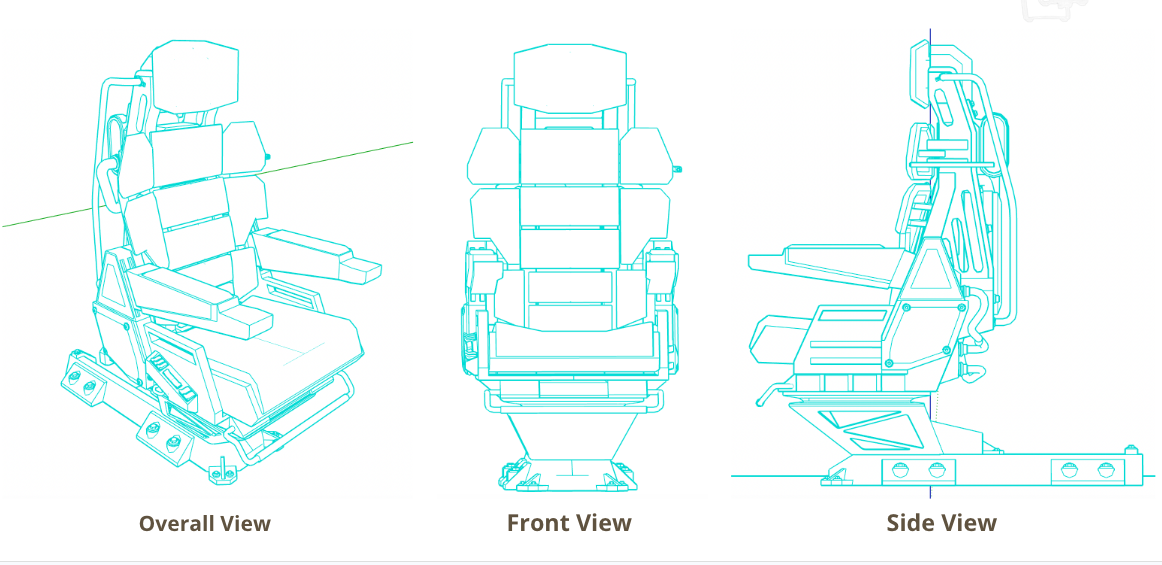
Integration
Finally, we integrated everything into a standard operating fixture. This included all three operator stations — pilot, payload operator, and data analyst — combined into a single synchronized operating system for coordinated awareness and operation.
Final Result
The final system represents a comprehensive, human-centered UAV control ecosystem. It maintains a delicate balance between automation and human oversight, ensuring high situational awareness with minimal operational fatigue.